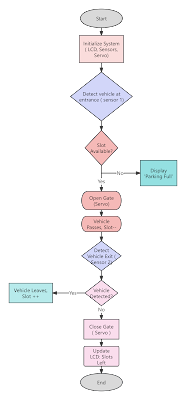
Allo cation of Roles and Analysis: In week one, our group decided on what each member's role was in the project, ensuring a smooth workflow where everyone knew what each others responsibilities were. We drafted a basic circuit architecture diagram and started had finalised the intended logic flow of the smart car-parking system. Team Members Michael Bond Yufei Fu Yujin Cao Amanah Mohammed J Abdulaal Introduction In preparation for the lab work, we designed a circuit diagram that can achieve the functions of the project. The smart car-parking system implements ultrasonic sensors to detect incoming and outgoing toy cars. One ultrasonic sensor is used to detect cars that are entering the car park, and the second sensor is used to detect cars that are leaving the car park. The system keeps track of how many spaces are available in the car park by subtracting one from the number of available spaces when a car enters the car park, and adds one to the number of available spaces when a ca...